
Eachine Racer 250 FPV
Bon, là, j’ai un peu de temps… alors j’ai craqué, je me suis lancé dans l’aventure Racer FPV.
Enfin c’est un bien grand mot, Racer FPV, parce que pour l’instant, je ne cours pas, et je n’ai pas de quoi visualiser le retour FPV !
Ceci dit, ça me démangeait depuis un bout de temps, de me prendre un petit quad un peu plus costaud que les X4 et consorts, même si je ne regrette pas d’avoir fait mes débuts avec ceux-ci (d’ailleurs, je m’éclate toujours avec !).
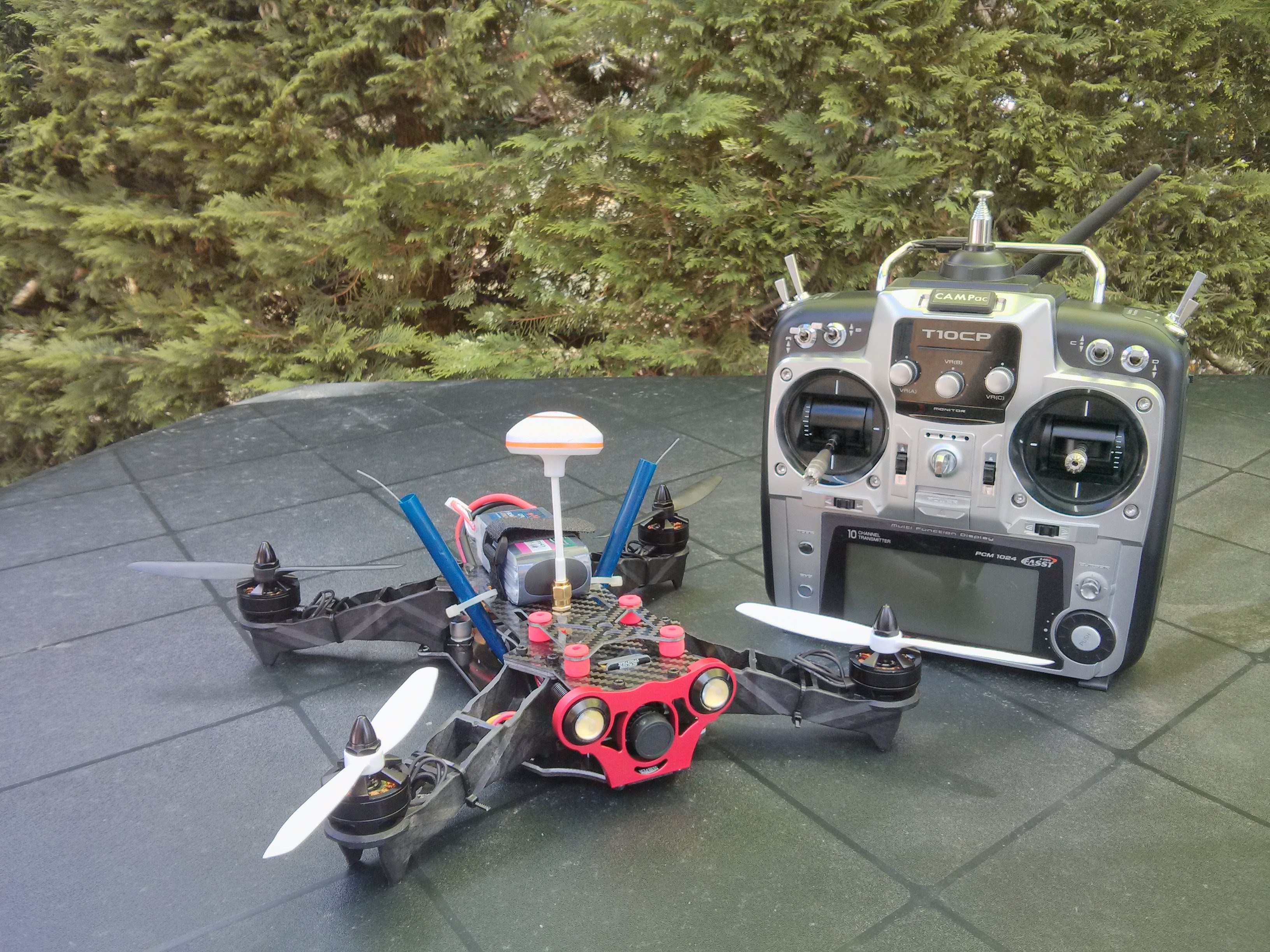
Mais voilà, l’intérêt d’un racer, catégorie 250 (25 cm de diagonale), c’est d’avoir un peu plus de pêche (oh si peu… !!???), d’être plus modulaire, et surtout, surtout… d’être utilisable avec ma futaba T10CP en mode pupitre !! et non pas avec ces affreuses radiocommandes-jouets livrés avec les packs loisirs…
Au passage, j’en profite pour lever une ambiguïté : le Racer 250 n’en est pas un … le 250 signifie normalement classe 250, soit 250 mm (25 cm) de diagonale, d’arbre moteur à arbre moteur. Mais en fait, il s’agit plutôt d’un classe 280, la diagonale mesurant très exactement… 280 mm ! Pourquoi me demanderez vous ? Mystère, vous répondrai-je…
Bref, commande vendredi, livré samedi matin (gamin… !!), et v’là le paquet devant moi !
Ah oui, je ne vous ai pas dit. Le Racer 250 existe en différents packs :
- RTF avec ou sans écran, mais avec une radio Eachine dérivée de la Flysky i6,
- ARF, donc prémonté et plus qu’à y glisser votre Rx et la batterie,
- DIY, c’est à dire… en kit. Pleins de petits sachets… tout plein tout plein tout plein !
Et devinez quoi… Ben pour une fois, j’ai dérogé à ma règle (plutôt avion…) du « j’ouvre et je vole » ! J’ai donc choisi la version DIY, non seulement pour une question de budget, mais aussi pour l’aspect apprentissage : monter, connecter, souder, tester, programmer un quadricoptère est une chose, je trouve, très formatrice et palpitante !
Du coup, il a fallu dégotter un fer à souder qui tienne la route, un plan de travail propre et éclairé, et un accès illimité à youtube, parce que pour les informations, c’est à peu près tout ce dont vous disposerez, en plus des forums.
Autant le dire tout de suite : l’aspect le plus pourri de ce kit, c’est la notice. Enfin le truc en 5 feuilles qui fait office de notice… Comme le dit pas mal de monde dans les fofo et sur les vidéos, c’est mal venu pour ce type de produit : un racer clairement typé débutant (perfs, qualité, budget), devrait avoir une notice plus complète, voire des conseils de réglage, enfin un minimum !! là, ça ressemble à un schéma technique pondu par un commercial… enfin je m’égare… :p
Sinon, passons au contenu de la boite.
L’ensemble est présenté dans une boite en carton joliment décorée, stylisée et … euh, on s’en fout ! Y a juste pleins de sachets, c’est correctement emballé, les cartes électroniques sont dans un emballage plastique isolant électrostatique, thermocollé. Je reconnais la Naze32 avec quelques faisceaux de câbles, très bien.
La visserie est là, il n’y a pas de surplus. Tout est aisément repérable, c’est parfait on peut démarrer.

Le PCB contient très peu d’électronique, mais à peu près tous les points de connexion nécessaires entre les ESC, le Flight Controller (FC), les leds, le module FPV, etc…
On voit également 4 gros condensateurs, a priori en entrée des ESC… probablement un filtrage pour stabiliser le signal des ESC et fiabiliser la commande des moteurs ?
Il paraît qu’en cas de crash, ceux-ci on tendance à partir vivre leur vie ailleurs, et certains recommandent même un point de colle chaude sur chacun pour les garder… sur le châssis. A vous de voir. Moi, je suis pas fan de la colle chaude dans l’électronique, mais c’es tune question de goûts.

Le contrôleur de vol, un Naze32 10DOF (ie Gyro 3 axes, Accéléromètre 3 axes, magnétomètre 3 axes, baromètre : on arrive bien à 10…) se trouve sur une carte support équipée de prises spécifiques eachine.
Très bien, ça nous évitera donc de la soudure sur des micro-composants. Merci Eachine !
Petite information complémentaire, maintes fois vue sur les vidéos youtube, mais pas du tout explicite, voire faux sur la notice : la Naze32 doit impérativement se retrouver avec la flèche vers l’avant, certes on s’en doutait, mais surtout avec les composants vers le dessus, et donc le port micro-USB à babord (euh à gauche quand on regarde vers l’avant, quoi !) ! déjà, ça simplifiera la connexion du fasceau des câbles moteur, mais en plus, vous n’aurez pas à régler d’offset sur l’orientation du FC par la suite (tout à zéro).
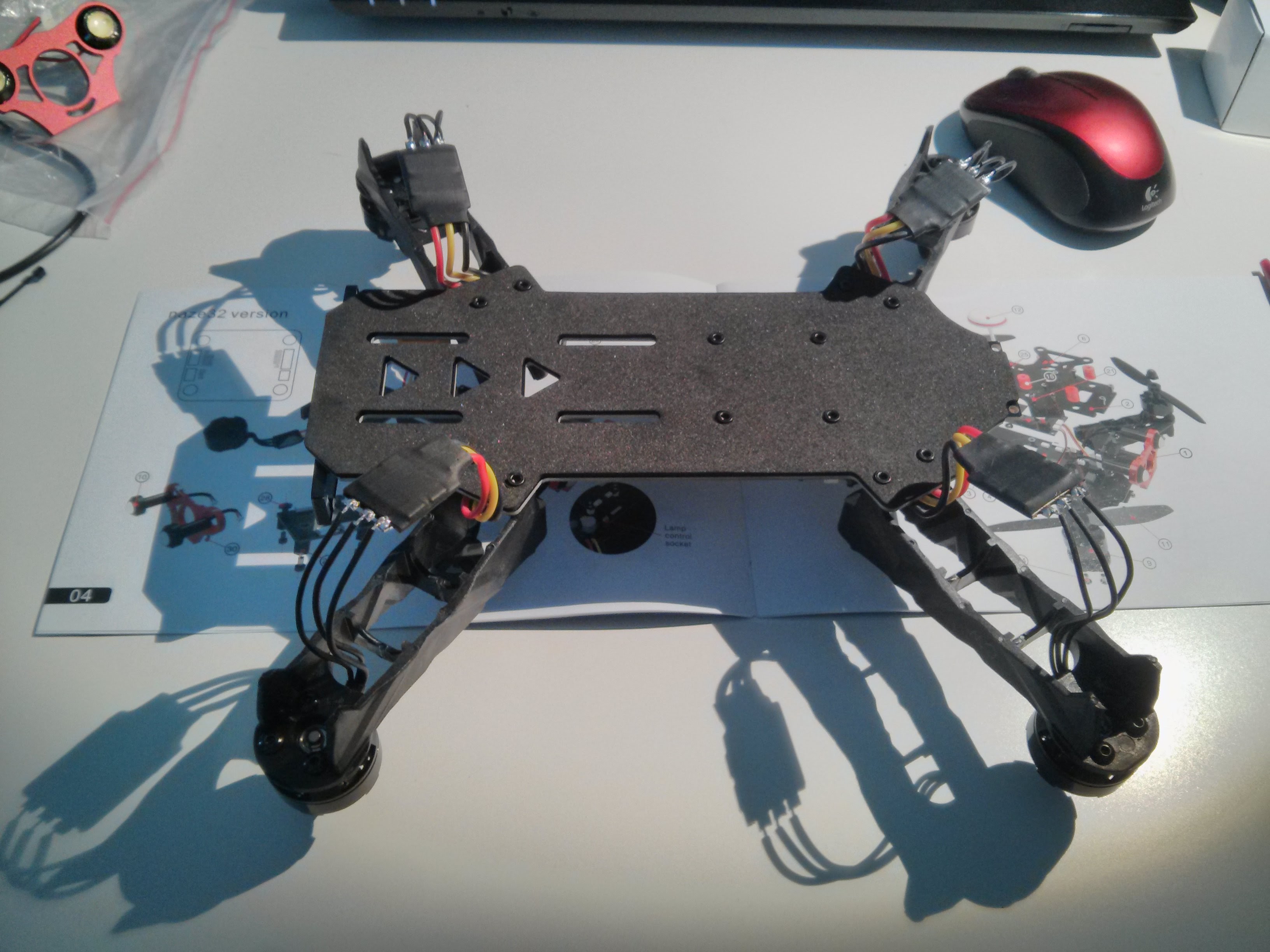
 Arrive ensuite la première série de soudures, les ESC, puis les moteurs… les ESC sont à souder directement sur le PCB, aux endroits classiques, avec :
Arrive ensuite la première série de soudures, les ESC, puis les moteurs… les ESC sont à souder directement sur le PCB, aux endroits classiques, avec :
- le rouge sur le [+]
- le jaune sur le [S] (comme signal)
- le noir sur le [-]
A noter : les points de soudure ne sont pas extrêmement petits, on n’est pas sur du CMS. Par conséquent, choisissez une panne pas trop grande, mais pas non plus minuscule (genre micro-électronique), ça ne servira à rien. Par contre, trouvez vous un fer à souder d’une puissance correcte, 60W seraient bien, je pense…
Une fois les 4 ESC soudés, on va pas tarder à passer à la fixation des moteurs. Attention, à ce moment là, il va falloir différencier les moteurs qui tournent en sens horaire (« CW » pour ClockWise) de ceux en sans anti-horaire (« CCW » pour Counter-ClockWise). Pour ça, normalement, les moteurs sont dans sachets séparés et marqués… si ce n’est pas le cas, une astuce toute simple : pour les moteurs CW, le pas de vis des cônes est … classique. Pas compris ? Ben c’est simple : prenez les moteurs CCW, et vous vous apercevrez que pour dévisser les cônes, il faut les tourner dans le sens inverse, c’est-à-dire les … visser ! C’est bête, mais imparable. Et d’ailleurs, c’est le seul truc qui les différencie. L’électronique est la même, le bobinage aussi, seuls les pas de vis sont dans le sens qui va bien, à savoir celui qui évite aux cônes de se dévisser en vol et laisser les hélices vivre leur vie… sans le quad.
 Bref ! Une fois les moteurs assemblés sur les bras, repérés 2 à 2 CW et CCW, on fixe le dessous de chaque bras, par 2 vis, au PCB.
Bref ! Une fois les moteurs assemblés sur les bras, repérés 2 à 2 CW et CCW, on fixe le dessous de chaque bras, par 2 vis, au PCB.
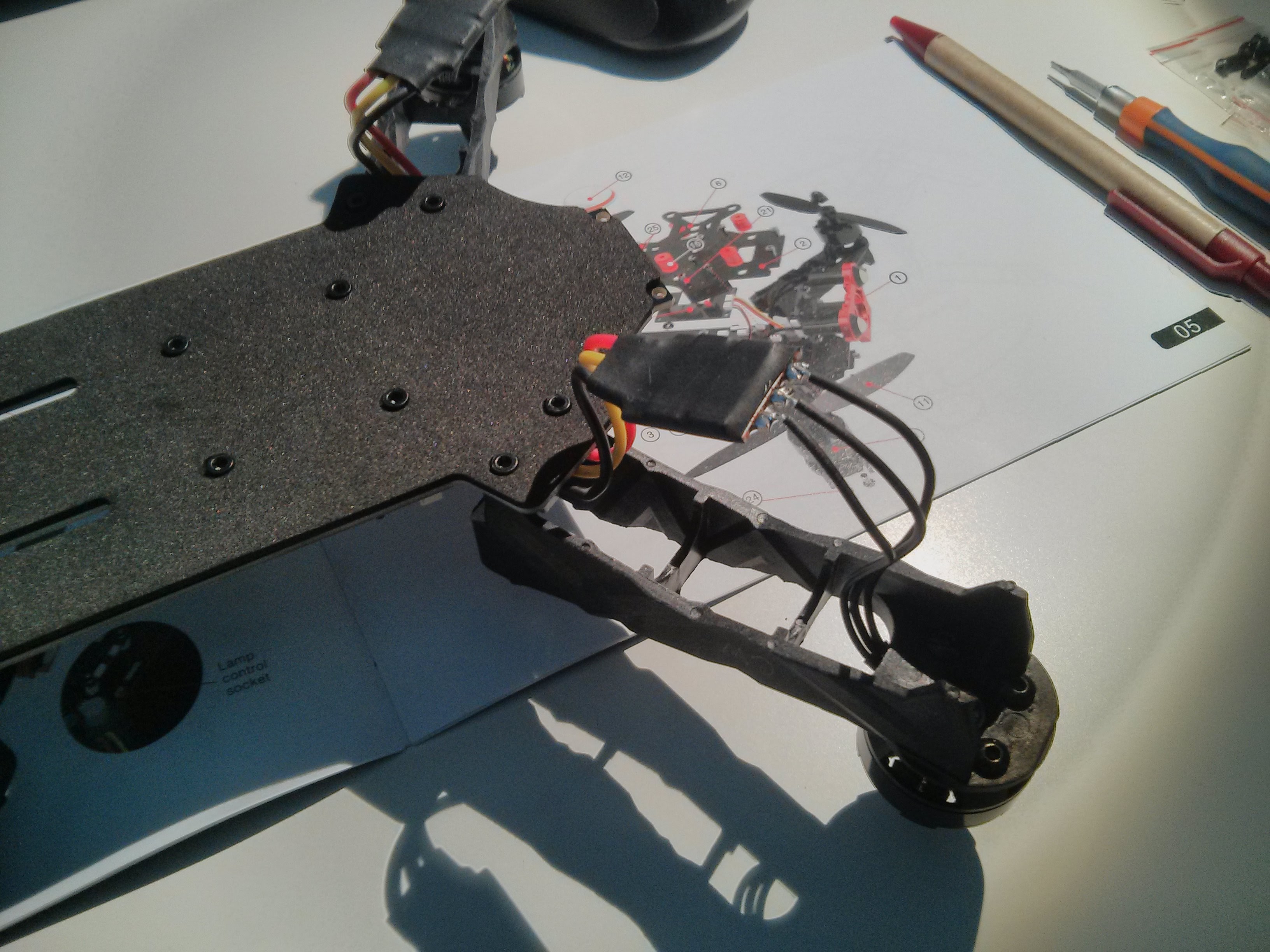
Une fois que c’est fait, il ne reste plus qu’à souder les 3 câbles de chaque moteur aux 3 plots de son ESC.
Il faut juste penser à passer les câbles aux endroits voulus de la structure, entre les entretoises des bras, parce qu’une fois soudé… on ne peut pas modifier ça sans dessouder !
Au moment de souder, ne vous prenez pas la tête à deviner quel fil du moteur va sur quel connecteur de l’ESC : la règle à ce sujet est simple. Si un moteur brushless ne tourne pas dans le bon sens, il suffit d’inverser 2 des 3 fils pour le changer. C’est ce qui m’est arrivé sur 2 de mes moteurs, j’a juste inversé les fils 1 et 3. Hop, terminé on n’en parle plus.
D’ailleurs à cette étape, ne vous prenez pas non plus la tête à installer et compacter les câbles et ESC dans les bras : s’il faut dessouder pour changer un moteur de sens… ou refaire une soudure… les colliers de serrage sont à mettre en toute fin de montage, quand le quad est réputé prêt à voler… enfin à mon sens.

Une fois les moteurs connectés aux ESC, et que le sens des moteurs est vérifié, vous pouvez ranger votre fer à souder… le reste se fera sans.
Vient ensuite la suite de l’électronique : vous allez devoir, successivement :
- Installer et connecter la carte de transmission vidéo (souvent abrégée VTX – Video Transmitter)
- Installer et connecter la caméra à la carte VTX
- placer la plaque supérieure du chassis, sur laquelle se trouve maintenant fixée la carte VTX, sur les bras du quad, en y plaçant 4 jeux de petites plaques carbone rectangulaires pour mettre tout ça à niveau.
Une fois que tout ceci est fait, 80% du montage est terminé.



Il s’agit ensuite d’aménagement a priori secondaires, mais fondamentaux pour le fonctionnement futur du quad. Dans cet article, je ne rentrerai pas dans les détails de la programmation de Cleanflight (c’est un chapitre à part entière !), mais quelques points clés quand même…
La batterie et le récepteur.
J’ai pas mal gambergé sur le sujet : batterie dedans ? récepteur dehors ? l’inverse ?
J’ai finalement opté pour la batterie au dessus, et le récepteur dedans, juste derrière la Naze32.
Pourquoi ? d’abord parce qu’en cas de choc violent, je préfère que la batterie explose l’antenne du VTX plutôt que de me réduire en bouillie ma Naze32 durement acquise (le traitement de ma commande fut rock’n’roll… mais ça s’est bien fini). Si je devais en changer, soit je devrais retrouver le form-factor spécifique Eachine avec les bons connecteurs, soit me taper de la micro-soudure et ça, ça me plaît déjà moins…
Ensuite, le récepteur, un Futaba R617FS (en PWM… ça a son importance !), est fixé à l’intérieur, une fois connecté, via 2 petits colliers de serrage. Pareil, en cas de crash, je préfère remplacer une batterie à 20 euros plutôt qu’un récepteur à 90. Question de goûts 😉
Au passage, vous vous êtes sûrement demandé « mais c’est quoi ces 2 tubes bleus horribles sur le côté du quad ?? » En fait, tout simple : les guides de l’antenne diversity (2 brins en 2.4GHz) de mon R617FS ! Vu qu’il faut que les brins :
- forment un angle assez proche de 90° l’un par rapport à l’autre,
- soient dégagés de toute matière métallique ou conductrice,
- accessoirement, ne risquent pas de passer dans le champ des hélices…,
J’ai cherché à les installer façon Runner 210 de Walkera. Ayant des amateurs de boissons sucrées avec une paille à la maison, j’ai tapé dans le stock une paille de la couleur la plus proche possible du noir (blanc ? trop voyant… mauve ? eeeeeeeeeeeeeeeeeeeuh non. Jaune ? Eârk. Rose ? NAAAAAAAAAAAN !!). Pliage pour la faire passer sous le chassis, 2 entailles triangulaires pour faire passer les brins, puis fixation par colliers sur le haut du chassis (pas très serré, pas besoin) ; et hop ! le tour est joué !
Du coup, la batterie se retrouve au dessus. Le centrage reste acceptable, en tout cas au vus de mes premiers essais statiques. A voir par la suite, mais de toutes façons, batterie en dessous, le centrage longitudinal serait identique, car si au dessus c’est le pied de l’antenne VTX qui fait buttée pour l’avancement de la batterie, en dessous, c’est le FC, en contact direct.
Dernier point crucial : si comme moi, vous n’utilisez pas, en tout cas dans un premier temps, le retour vidéo, ne faites surtout pas l’impasse sur l’antenne : si vous alimentez votre quad sans brancher l’antenne, la carte VTX va se mettre à chauffer jusqu’à défaillance totale… et hop, une carte HS avant d’avoir servi !! Donc si vous ne faites pas d’immersion, soit vous mettez quand même l’antenne (après tout pourquoi pas, elle a une bonne gueule, non ?), soit vous déconnectez la VTX, voire… vous la démontez : vous gagnez même de la place sur la carte du haut, vu que le connecteur d’antenne disparaîtra du même coup.
Voilà pour cet article. On a donc rapidement vu les étapes de montage, quelques rappels idiots mais tellement utiles sur les moteurs, les soudures, etc… Et le placement des éléments (batterie, Rx) qui ne sont pas abordés dans la notice, et pas toujours sur le Net.
Dans le prochain article sur ce Racer 250, on abordera les réglages avec Cleanflight et la Naze32, ainsi que quelques éléments importants de câblage…
Si cet article vous a plu et/ou vous a aidé, n’hésitez pas à laisser mettre une note et/ou laisser un commentaire !


